
This work is a collaboration of three engineering students. We created a teaching aid, which allows for precision and distance learning of physical tasks. A soft trasmitting glove captures a teacher's hand motions, while servos guide the exoskeleton user's hand to recreate the movement in real time. Customized with a 3D scanner and created with a 3D printer, the exoskeleton is fit to the user's hand.
This project was developed as part of an internship at Autodesk, and created at Autodesk's San Francisco Pier 9 facility.
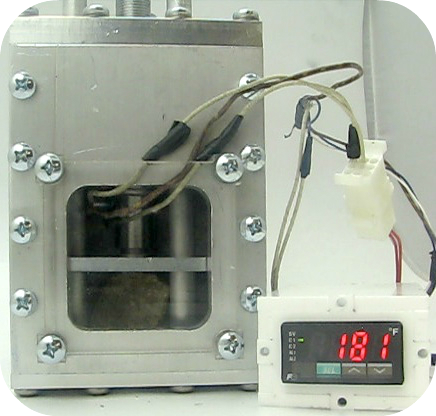
Another student and I developed and researched a new material to be used as a motor in soft robotics. We found that the material expands as it is heated by thermal or electric means. I harnessed and characterized this process's extension force using a custom built testing apparatus (pictured at left.)
This research was conducted at the Cornell Creative Machines Lab under Professor Hod Lipson.
I believe we do our best work on projects that interest us.
I'm excited about interdisciplinary problems, from product design to robotics.
 ngle
ngle